
Какие колебания относятся к механическим. Механические колебания: что это? Значение колебаний в науке и технике
Механическими колебаниями называются движения, которые точно или приблизительно точно повторяются через определенные интервалы времени. тЦля колебаний характерно, что колеблющееся тело, например маятник, попеременно смещается то в одну, то в другую сторону. При вращении тела движение также периодически повторяется, но смещений в противоположные стороны относительно по-ложения равновесия не происходит. Колебательное и вращательное движения вызываются силами, которые, как правило, по-разному зависят от расстояний между телами.
§1.1. КЛАССИФИКАЦИЯ КОЛЕБАНИЙ
По характеру физических процессов в системе, которые вызывают колебательные движения, различают три основных вида колебаний: свободные, вынужденные и автоколебания.
Свободные колебания
Самым простым видом колебаний являются свободные ко-лебания. Свободные колебания возникают в системе под действием внутренних сил после того, как система выведена из положения равновесия. Такие колебания совершает груз, подвешенный на пружине іглс. 1.1), шарик на нити (маятник) (рис. 1.2) и др.
Эти системы обладают устойчивым положением равновесия, в котором действующие на тело силы взаимно уравнове-
-»
шены. Сила тяжести F, действующая на шарик, уравновеше-
-»
на или силой упругости растянутой пружины F0 (рис. 1.3),
-»
или силой натяжения нити маятника FQ (рис. 1.4). При выведении системы из положения равновесия начинают действо-
Рис. 1.3
Рис. 1.4
О
вать силы, направленные к этому положению. В результате и возникают колебания.
Он
Рассмотрим подробнее, почему возникают колебания, например, шарика, подвешенного на пружине. Если сместить шарик вниз так, чтобы длина пружины уве-личилась на х (рис. 1.5), то на шарик начнет действовать дополнительная сила
F..
X
Рис. 1.5
упругости ґ , модуль которой пропорционален согласно закону Гука удлинению пружины. Эта сила направлена вверх, и под ее воздействием шарик с ускорением начнет двигаться вверх, постепенно увеличивая скорость. Сила при этом будет уменьшаться, так как пружина сокращает-ся. В момент, когда шарик достигнет положения равновесия, сумма всех сил, действующих на него, станет равной нулю. Следовательно, и ускорение шарика согласно второму закону Ньютона станет равным нулю.
Но к этому моменту скорость шарика уже достигнет некоторого значения. Поэтому, не останавливаясь в положении равновесия, он будет по инерции продолжать подниматься вверх. Пружина при этом сжимается, и в результате появляется сила, направленная уже вниз и тормозящая движение шарика (рис. 1.6). Эта сила, а значит, и направленное вниз ус-корение увеличиваются прямо пропорционально абсолютному значению смещения х шарика относительно положения равновесия. Скорость убывает до тех пор, пока в самой верхней точке не обратится в нуль. После этого шарик с ускорением
Ш
х
Of
начнет двигаться вниз. С уменьшением х модуль силы Fy убывает и в положении равновесия опять обращается в нуль. Но шарик уже успевает к этому моменту набрать скорость и продолжает двигаться вниз. Это движение приводит к дальнейшему растяжению пружины и к появлению силы, направленной вверх. Движение шарика тормозится до полной остановки в крайнем нижнем положении, после чего весь процесс повторяется сначала.
Если бы не существовало трения, то движение шарика не прекратилось бы никогда.
Рис. 1.6
Однако трение есть, причем сила трения как при движении шарика вверх, так и при движении вниз все время направлена против скорости. Она тормозит движение шарика, и поэтому размах его колебаний постепенно уменьшается до тех пор, пока движение не прекратится. При малом трении затухание становится заметным лишь после того, как шарик совершит много колебаний. И если интересоваться движением шарика на протяжении не очень большого интервала времени, то затуханием его колебаний можно пренебречь. В этом случае влияние силы трения на движение можно не учитывать.
Если же сила трения велика, то пренебречь ее действием и в течение малых интервалов времени нельзя. Опустите шарик на пружине в стакан с вязкой жидкостью, например с глицерином. Если пружина достаточно мягкая, то выведенный из положения равновесия шарик совсем не будет колебаться. Под действием силы упругости он просто вернется в положение равновесия, но выше уже подниматься не будет; за счет действия силы трения скорость его в положении равновесия будет практически равна нулю.
Теперь можно сообразить, что же является существенным для того, чтобы в системе могли возникнуть свободные колебания. Необходимо выполнение двух условий. Во-первых, при выведении тела из положения равновесия в системе должна возникать сила, направленная к положению равновесия, и следовательно, стремящаяся возвратить тело в положение равновесия. Именно так действует в рассмотренной нами системе сила упругости пружины и сила тяжести: и при перемещении шарика вверх, и при его перемещении вниз результирующая сила направлена к положению равновесия. Во-вторых, трение в системе должно быть достаточно мало, иначе колебания быстро затухнут или даже не возникнут. Незатухающие коле-бания возможны лишь при отсутствии трения.
Оба условия являются совершенно общими, справедливыми для любой системы, в которой могут возникнуть свободные колебания. Проверьте это самостоятельно на другой простой системе - маятнике. Нужно при этом иметь в виду, что шарик на нити будет представлять собой маятник лишь в том случае, если на него действует сила тяжести. Создающий эту силу земной шар входит в колебательную систему, которую для краткости мы называем просто маятником.
Вынужденные колебания
Колебания, совершаемые телами под действием внешних периодически изменяющихся сил, называются вынужденными.
Такие колебания будет, например, совершать книга на столе, если мы начнем двигать ее вперед и назад рукой. Колебания книги в данном случае вызваны действием силы со стороны руки, которая меняется по модулю и направлению. Вынужденными колебаниями являются также колебания поршней в цилиндрах двигателя внутреннего сгорания, иглы швейной машины и т. д. Особый интерес, как мы увидим в дальнейшем, представляют вынужденные колебания в системе, способной совершать свободные колебания.
Автоколебания
Наиболее сложным видом колебаний являются автоколебания. Автоколебаниями называются незатухающие ко-лебания, которые могут существовать в системе без воздействия на нее внешних периодических сил. Для этого система должна обладать собственным источником энергии. За счет энергии источника колебания не затухают, несмотря на действие сил трения. Наиболее известной автоколебательной системой являются часы с маятником или балансиром. Автоколебания мы рассмотрим в конце зїой главы.
(или собственные колебания ) — это колебания колебательной системы, совершаемые только благодаря первоначально сообщенной энергии (потенциальной или кинети-ческой) при отсутствии внешних воздействий.
Потенциальная или кинетическая энергия может быть сообщена, например, в механических системах через начальное смещение или начальную скорость.
Свободно колеблющиеся тела всегда взаимодействуют с другими телами и вместе с ними обра-зуют систему тел, которая называется колебательной системой .
Например, пружина, шарик и вертикальная стойка, к которой прикреплен верхний конец пружины (см. рис. ниже), входят в колебательную систему. Здесь шарик свободно скользит по струне (силы трения пренебрежимо малы). Если отвести шарик вправо и предоставить его самому себе, он будет совершать свободные колебания около положения равновесия (точки О ) вследствие действия силы упругости пружины, направленной к положению равновесия.
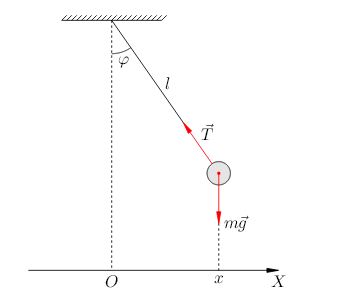
Другим классическим примером механической колебательной системы является математический маятник (см. рис. ниже). В данном случае шарик совершает свободные колебания под действием двух сил: силы тяжести и силы упругости нити (в колебательную систему входит также Земля). Их равнодействующая направлена к положению равновесия.

Силы, действующие между телами колебательной системы, называются внутренними силами . Внешними силами называют-ся силы, действующие на систему со стороны тел, не входящих в нее. С этой точки зрения свобод-ные колебания можно определить как колебания в системе под действием внутренних сил после того, как система выведена из положения равновесия.
Условиями возникновения свободных колебаний являются:
1) возникновение в них силы, возвращающей систему в положение устойчивого равновесия, после того как ее вывели из этого состояния;
2) отсутствие трения в системе.
Динамика свободных колебаний.
Колебания тела под действием сил упругости . Уравнение колебательного движения тела под действием силы упругости F () может быть получено с учетом второго закона Ньютона (F = mа ) и закона Гука (F упр = -kx ), где m — масса шарика, а — ускорение, приобретаемое шариком под действием силы упругости, k — коэффициент жесткости пружины, х — смещение тела от положения равновесия (оба уравнения записаны в проекции на горизонтальную ось Ох ). Приравнивая правые части этих уравнений и учитывая, что ускорение а — это вторая производная от координаты х (смещения), получим:
 .
.
Аналогично выражение для ускорения а получим, дифференцируя (v = -v m sin ω 0 t = -v m x m cos (ω 0 t + π/2) ):
a = -a m cos ω 0 t,
где a m = ω 2 0 x m — амплитуда ускорения. Таким образом, амплитуда скорости гармонических коле-баний пропорциональна частоте, а амплитуда ускорения — квадрату частоты колебания.
Темы кодификатора ЕГЭ: гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания - это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания - это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия - это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание . Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела - это величина его наибольшего отклонения от положения равновесия.
Период колебаний - это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний - это величина, обратная периоду: . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них - синус и косинус - являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания - это колебания, при которых координата зависит от времени по гармоническому закону:
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому - амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой . Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
(2)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1) :
График функции (1) , выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1 .
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
График гармонических колебаний в этом случае представлен на рис. 2 .
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
График колебаний представлен на рис. 3 .
 |
| Рис. 3. Закон синуса |
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1) . Дифференцируем это равенство:
. (4)
Теперь дифференцируем полученное равенство (4) :
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
. (6)
Это соотношение называется уравнением гармонических колебаний . Его можно переписать и в таком виде:
. (7)
C математической точки зрения уравнение (7)
является дифференциальным уравнением
. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
Решением уравнения (7) является всякая функция вида (1) с произвольными ;
Никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6) , (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий - по начальным значениям координаты и скорости.
Пружинный маятник.
Пружинный маятник - это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4 ). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
. (8)
Если (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
Тогда соотношение (8) принимает вид:
Мы получили уравнение гармонических колебаний вида (6) , в котором
Циклическая частота колебаний пружинного маятника, таким образом, равна:
. (9)
Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10) .
Математический маятник.
Математический маятник - это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5 ). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
и спроектируем его на ось :
Если маятник занимает положение как на рисунке (т. е. ), то:
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
Итак, при любом положении маятника имеем:
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11) :
Это - уравнение гармонических колебаний вида (6) , в котором
Следовательно, циклическая частота колебаний математического маятника равна:
. (12)
Отсюда период колебаний математического маятника:
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания
, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6 ).
Вынужденные колебания - это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7 .
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты наступает резонанс - явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .
Механические колебания
1. Механические колебания
1.1 Механические колебания: гармонические, затухающие и вынужденные колебания
1.2 Автоколебания
1.3 Разложение колебаний в гармонический спектр. Применение гармонического анализа для обработки диагностических данных
1.4 Механические волны, их виды и скорость распространения
1.5 Энергетические характеристики волны
Список использованных источников
1. Механические колебания
1.1 Механические колебания: гармонические, затухающие и вынужденные колебания
Колебаниями называются процессы, отличающиеся той или иной степенью повторяемости (качание маятника часов, колебания струны или ножек камертона, напряжение между обкладками конденсатора в контуре радиоприемника, работа сердца).
В зависимости от физической природы повторяющегося процесса различают колебания: механические, электромагнитные, электромеханические и т.д. Мы будем рассматривать механические колебания. Колебания, происходящие при отсутствии трения и внешних сил, называются собственными; их частота зависит только от свойств системы.
Простейшими являются гармонические колебания, т.е. такие колебания, при которых колеблющаяся величина (например, отклонение маятника) изменяется со временем по закону синуса или косинуса.
Дифференциальное уравнение гармонического колебания
Рассмотрим простейшую колебательную систему: шарик массой m подвешен на пружине.
В этом случае упругая сила F1 уравновешивает силу тяжести mg. Если сместить шарик на расстояние х , то на него будет действовать большая упругая сила (F1 + F). Изменение упругой силы по закону Гука пропорционально изменению длины пружины или смещению шарика х:
где k - жесткость пружины. Знак "-" отражает то обстоятельство, что смещение и сила имеют противоположные направления.
где (w 0 t + a 0) = a - фаза колебаний; a 0 - начальная фаза при t = 0; w 0 - круговая частота колебаний; A - их амплитуда.
Итак, смещение x изменяется со временем по закону косинуса.
Следовательно, движение системы, находящейся под действием силы вида f = - kx, представляет собой гармоническое колебание.
Для пружинного маятника получаем:
Круговая частота связана с обычной n соотношением: .
Энергия при гармоническом колебании
Выясним, как изменяется со временем кинетическая Еk и потенциальная Еп энергия гармонического колебания. Кинетическая энергия равна:
, (4)где k = m w 0 2 .
Потенциальную энергию находим из формулы потенциальной энергии для упругой деформации и используя (3):
(5)Складывая (4) и (5), с учетом соотношения
, получим:E = E K + E П =
. (6)Таким образом, полная энергия гармонического колебания остается постоянной в отсутствие сил трения, во время колебательного процесса кинетическая энергия переходит в потенциальную и наоборот.
Затухающие колебания
Колебания, происходящие в системе при отсутствии внешних сил (но при наличии потерь на трение или излучение), называются свободными. Частота свободных колебаний зависит от свойств системы и интенсивности потерь.
Наличие трения приводит к затухающим колебаниям. Колебания с убывающей амплитудой называются затухающими.
Допустим, что на систему, кроме квазиупругой силы, действуют силы сопротивления среды (трения), тогда второй закон Ньютона имеет вид:
. (7)Ограничимся рассмотрением малых колебаний, тогда и скорость системы будет малой, а при небольших скоростях сила сопротивления пропорциональна величине скорости:
, (8)где r - коэффициент сопротивления среды. Знак " - " обусловлен тем, что F тр и V имеют противоположные направления.
Подставим (8) в (7). Тогда
илиОбозначим
,
где b - коэффициент затухания, w 0 - круговая частота собственных колебаний. Тогда
Решение этого уравнения существенно зависит от знака разности: w 2 = w 0 2 -b 2 , где w - круговая частота затухающих колебаний. При условии w 0 2 -b 2 > 0, w является действительной величиной и решение (3) будет следующим:
График этой функции дан на рисунке.
Рис. 2. Затухающие колебания.
Пунктиром изображено изменение амплитуды: A = ±A 0 e - b t .
Период затухающих колебаний зависит от коэффициента трения и равен:
(11)При незначительном сопротивлении среды (b2 < Из формулы, выражающей закон убывания амплитуды колебаний, можно убедиться, что отношение амплитуд, отделенных друг от друга интервалом в один период (Т), остается постоянным в течение всего процесса затухания. Действительно, амплитуды колебаний, отделенные интервалом в один период, выражаются так: Это отношение называют
этого отношения:
Эта величина носит название логарифмического декремента затухания за период.
При сильном затухании b 2 > w02 из формулы (11) следует, что период колебания является мнимой величиной. Движение при этом носит апериодический (непериодический) характер - выведенная из положения равновесия система возвращается в положение равновесия, не совершая колебаний. Каким из этих способов приходит система в положение равновесия, зависит от начальных условий.
Вынужденные колебания. Резонанс
Вынужденными называются такие колебания, которые возникают в колебательной системе под действием внешней периодически изменяющейся силы (вынуждающей силы). Пусть вынуждающая сила изменяется со временем по гармоническому закону: f = F0 cosW t , где F0 - амплитуда, W - круговая частота вынуждающей силы.
При составлении уравнения движения нужно учесть, кроме вынуждающей силы, также те силы, которые действуют в системе при свободных колебаниях, то есть квазиупругую силу и силу сопротивления среды. Тогда уравнение движения (второй закон Ньютона) запишется следующим образом:
Разделив это уравнение на m и перенеся члены с dx и d 2 x в левую часть получим неоднородное линейное дифференциальное уравнение второго порядка.